Human Detection Localization
OpenCV | Augmentation | NMS | UML | ROS2 | Vision
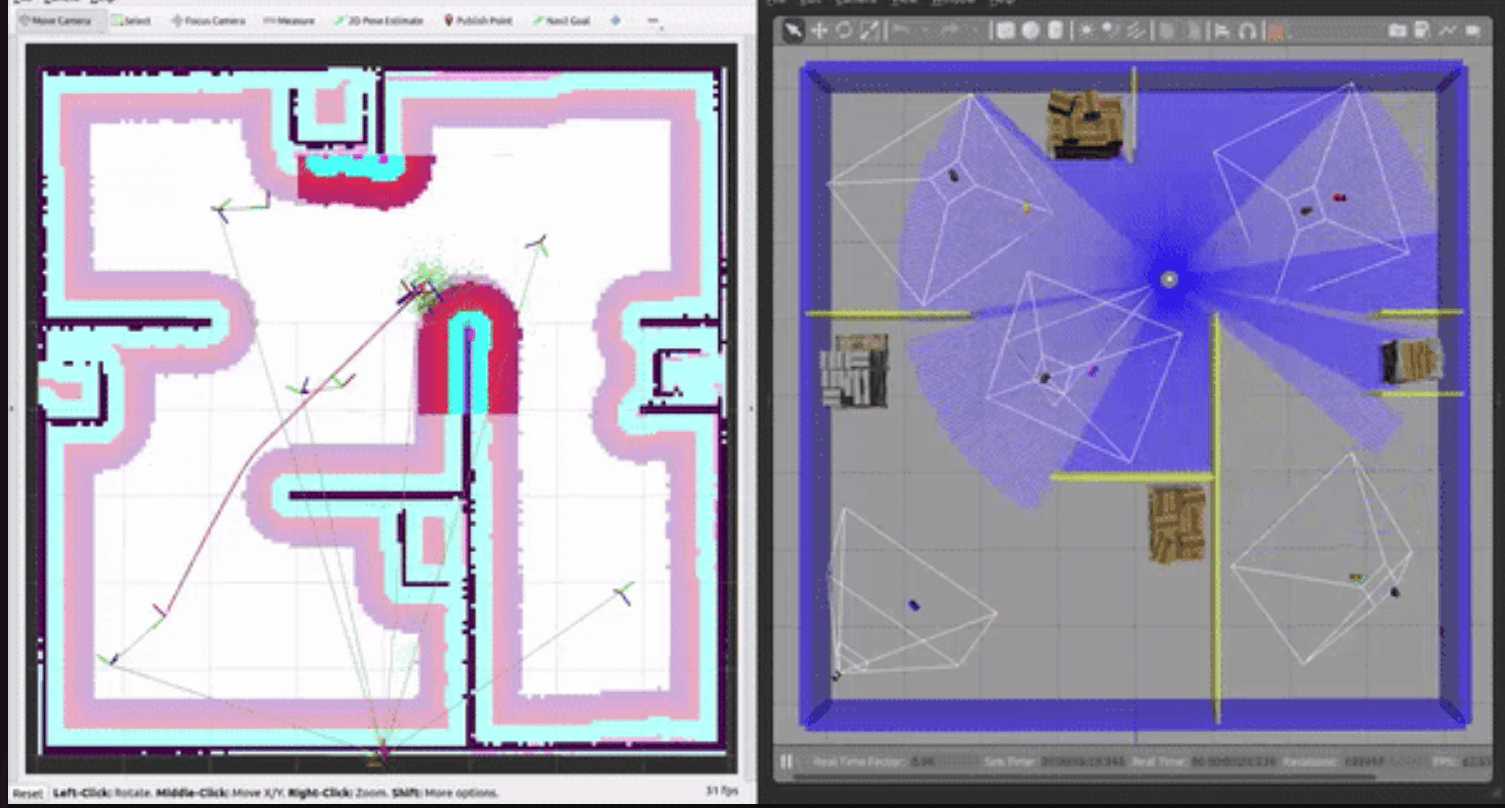
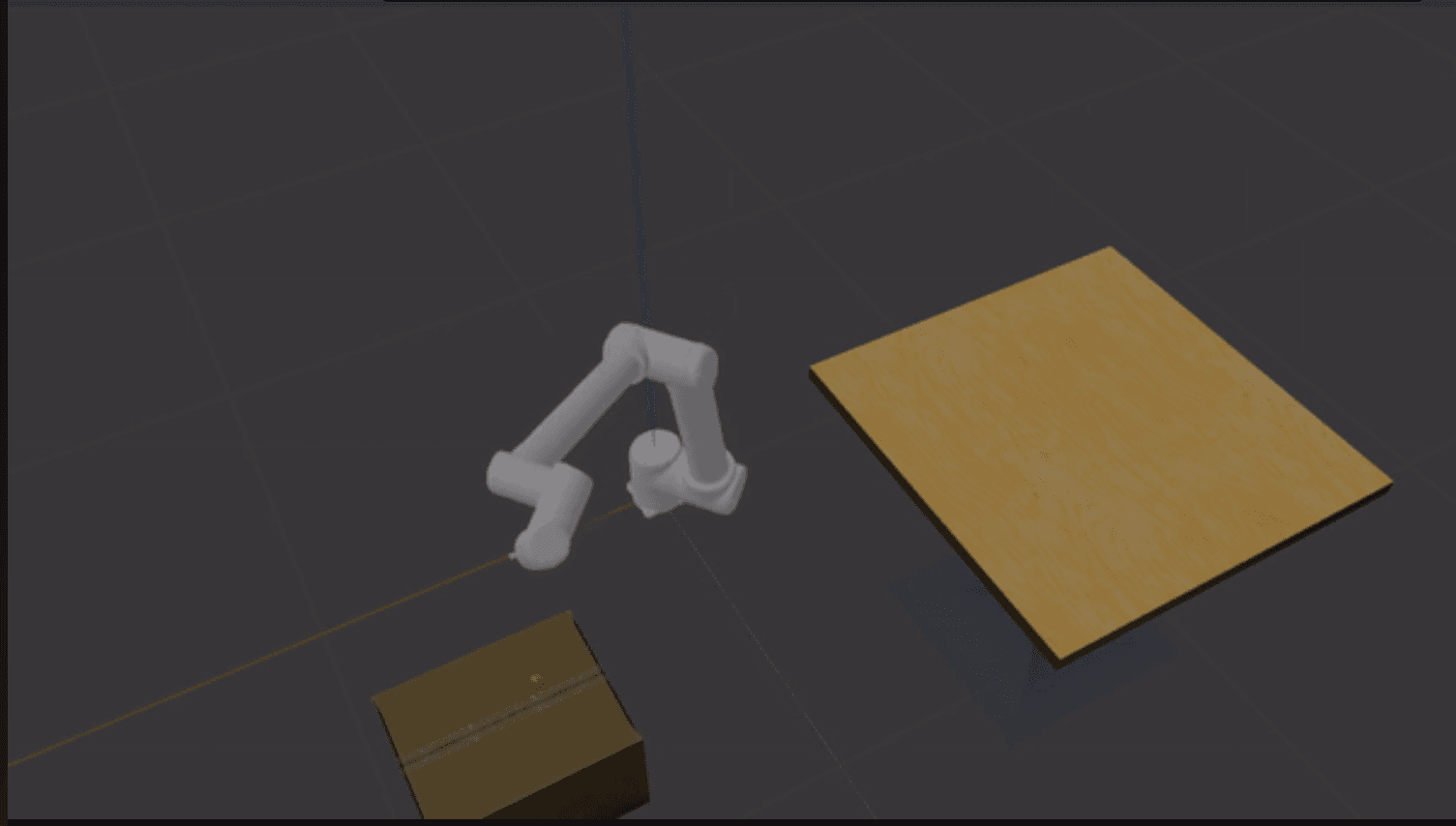
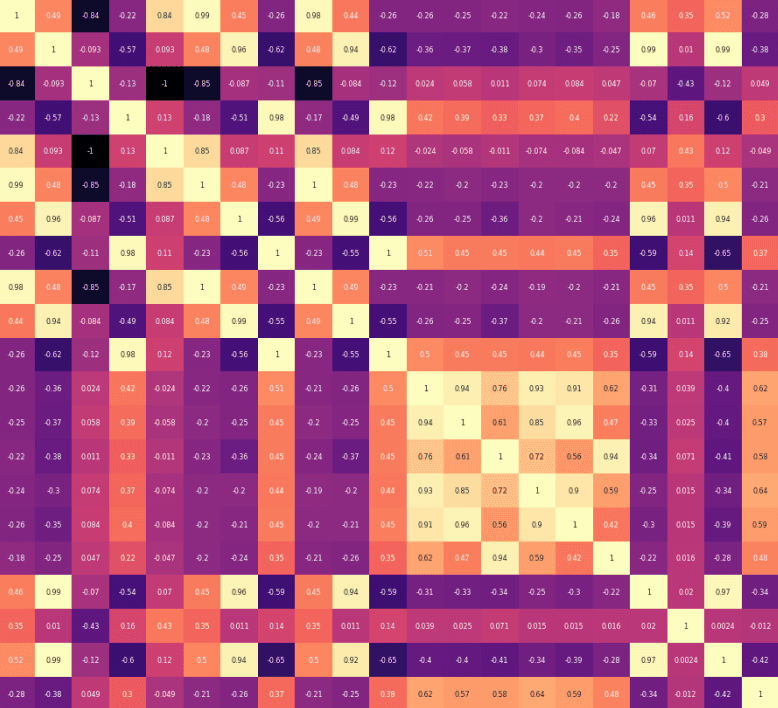
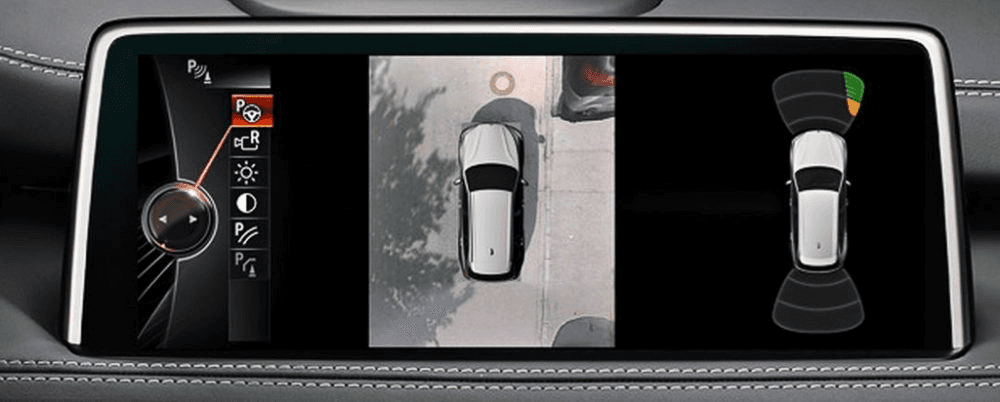
This project implements real-time human detection, tracking, and avoidance using the YOLOv5s model, enhanced with perspective transformation using a monocular camera and get the transformation from global to robot to camera frame of reference
View Project
Human Detection Localization
OpenCV | Augmentation | NMS | UML | ROS2 | Vision
This project implements real-time human detection, tracking, and avoidance using the YOLOv5s model, enhanced with perspective transformation using a monocular camera and get the transformation from global to robot to camera frame of reference
View Project
Human Detection Localization
OpenCV | Augmentation | NMS | UML | ROS2 | Vision
This project implements real-time human detection, tracking, and avoidance using the YOLOv5s model, enhanced with perspective transformation using a monocular camera and get the transformation from global to robot to camera frame of reference
View Project