




02
Work Experience
02
Work Experience
02
Work Experience
AI Research Engineer
@Collective Dynamics & Controls Lab x DARPA
| Sept, 2024 - PRESENT
Fine-tuned vision-language models (ViT & Spatial VAEs) using PEFT & LoRA for casualty detection/classification tasks; improved mAP by 22% while reducing false positives by 30%, meeting DARPA Triage Challenge benchmarks.
Curated & augmented large scale datasets using Stable Diffusion & Labelbox to enhance generalization for varied scenarios.Conducted large-scale finetuning on multi-GPU clusters further deploying AI models on Spot UGV.
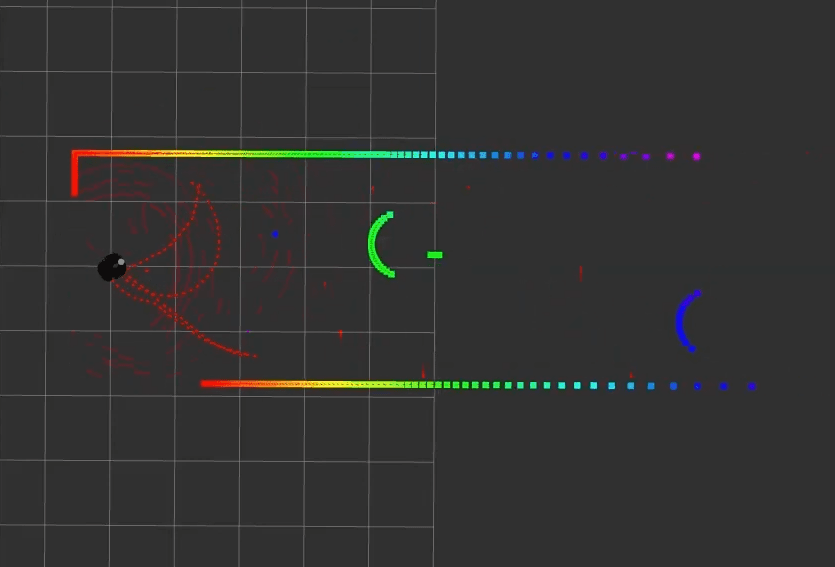
Developed Nav2 Behavior Trees for autonomous navigation, integrating custom plugins for obstacle avoidance and mission-specific planning.
Demonstrated proficiency in Pytorch, Computer Vision, ONNX, OpenCV, ROS2, Docker, Fine-tuning, Transformers, ROS, Robotics, CUDA, Optimization}
AI Research Engineer
@Collective Dynamics & Controls Lab x DARPA
| Sept, 2024 - PRESENT
Fine-tuned vision-language models (ViT & Spatial VAEs) using PEFT & LoRA for casualty detection/classification tasks; improved mAP by 22% while reducing false positives by 30%, meeting DARPA Triage Challenge benchmarks.
Curated & augmented large scale datasets using Stable Diffusion & Labelbox to enhance generalization for varied scenarios.Conducted large-scale finetuning on multi-GPU clusters further deploying AI models on Spot UGV.
Developed Nav2 Behavior Trees for autonomous navigation, integrating custom plugins for obstacle avoidance and mission-specific planning.
Demonstrated proficiency in Pytorch, Computer Vision, ONNX, OpenCV, ROS2, Docker, Fine-tuning, Transformers, ROS, Robotics, CUDA, Optimization}
AI Research Engineer
@Collective Dynamics & Controls Lab x DARPA
| Sept, 2024 - PRESENT
Fine-tuned vision-language models (ViT & Spatial VAEs) using PEFT & LoRA for casualty detection/classification tasks; improved mAP by 22% while reducing false positives by 30%, meeting DARPA Triage Challenge benchmarks.
Curated & augmented large scale datasets using Stable Diffusion & Labelbox to enhance generalization for varied scenarios.Conducted large-scale finetuning on multi-GPU clusters further deploying AI models on Spot UGV.
Developed Nav2 Behavior Trees for autonomous navigation, integrating custom plugins for obstacle avoidance and mission-specific planning.
Demonstrated proficiency in Pytorch, Computer Vision, ONNX, OpenCV, ROS2, Docker, Fine-tuning, Transformers, ROS, Robotics, CUDA, Optimization}
Software Intern, Computer Vision
@Mowito Robotics
| Jul, 2024 - Aug, 2024
Achieved a 30% reduction in MAE for encoder diagnostics by optimizing a vision engine using OpenCV & ROS2 while testing it on ROSBags and deployed on a UR10 robotic arm for predictive maintenance
Led research on CLIP-based Vision-Language Agents (VLA), integrating FoundationPose for 6D pose estimation and SAM for segmentation to enhance object localization in dynamic environments. Built an interactive evaluation framework with Langchain and Streamlit, enabling seamless natural language-based task instructions using LLMs.
Software Intern, Computer Vision
@Mowito Robotics
| Jul, 2024 - Aug, 2024
Achieved a 30% reduction in MAE for encoder diagnostics by optimizing a vision engine using OpenCV & ROS2 while testing it on ROSBags and deployed on a UR10 robotic arm for predictive maintenance
Led research on CLIP-based Vision-Language Agents (VLA), integrating FoundationPose for 6D pose estimation and SAM for segmentation to enhance object localization in dynamic environments. Built an interactive evaluation framework with Langchain and Streamlit, enabling seamless natural language-based task instructions using LLMs.
Robotics Perception Intern
@Mowito Robotics, PA
| JUL, 2024 - AUG, 2024
Optimized a vision engine for encoder diagnostics using ROS2 Behavior Trees & Services, improving robotic arm stability by 30% via noise reduction.
Deployed vision-based predictive maintenance on a UR10 robotic arm, integrating MoveIt for motion planning.
Led research on CLIP-based image segmentation for real-time robotic pick-and-place estimation, leveraging LangChain & Streamlit.
Robotics Perception Intern
@Mowito Robotics, PA
| JUL, 2024 - AUG, 2024
Optimized a vision engine for encoder diagnostics using ROS2 Behavior Trees & Services, improving robotic arm stability by 30% via noise reduction.
Deployed vision-based predictive maintenance on a UR10 robotic arm, integrating MoveIt for motion planning.
Led research on CLIP-based image segmentation for real-time robotic pick-and-place estimation, leveraging LangChain & Streamlit.
Graduate Research Assistant
@Maryland Robotics Center, UMD
| Dec, 2023 - Mar, 2024
Pioneered Enhanced autonomous driving perception by integrating Swin Transformer & ViT-B32 with UNet, optimizing feature extraction for ADAS scene segmentation .Implemented scalable training pipelines on distributed GPU clusters and utilized ONNX Runtime to achieve real-time inference capability. Demonstrated expertise in RNNs/LSTMs & CNN Models.
Developed medical imaging pipeline using 3D UNet for Type-B Aortic segmentation utilizing CUDA Runtime. Automated dataset augmentation pipelines, increasing generalizability deploying on AWS Sagemaker
Built high-fidelity radar and LiDAR simulations for the DARPA Cognisense Project, supporting autonomous vehicle decision-making in complex environments.
Graduate Research Assistant
@Maryland Robotics Center, UMD
| Dec, 2023 - Mar, 2024
Pioneered Enhanced autonomous driving perception by integrating Swin Transformer & ViT-B32 with UNet, optimizing feature extraction for ADAS scene segmentation .Implemented scalable training pipelines on distributed GPU clusters and utilized ONNX Runtime to achieve real-time inference capability. Demonstrated expertise in RNNs/LSTMs & CNN Models.
Developed medical imaging pipeline using 3D UNet for Type-B Aortic segmentation utilizing CUDA Runtime. Automated dataset augmentation pipelines, increasing generalizability deploying on AWS Sagemaker
Built high-fidelity radar and LiDAR simulations for the DARPA Cognisense Project, supporting autonomous vehicle decision-making in complex environments.
Graduate Research Assistant
@Maryland Robotics Center, UMD
| Dec, 2023 - Mar, 2024
Pioneered Enhanced autonomous driving perception by integrating Swin Transformer & ViT-B32 with UNet, optimizing feature extraction for ADAS scene segmentation .Implemented scalable training pipelines on distributed GPU clusters and utilized ONNX Runtime to achieve real-time inference capability. Demonstrated expertise in RNNs/LSTMs & CNN Models.
Developed medical imaging pipeline using 3D UNet for Type-B Aortic segmentation utilizing CUDA Runtime. Automated dataset augmentation pipelines, increasing generalizability deploying on AWS Sagemaker
Built high-fidelity radar and LiDAR simulations for the DARPA Cognisense Project, supporting autonomous vehicle decision-making in complex environments.